OVERVIEW


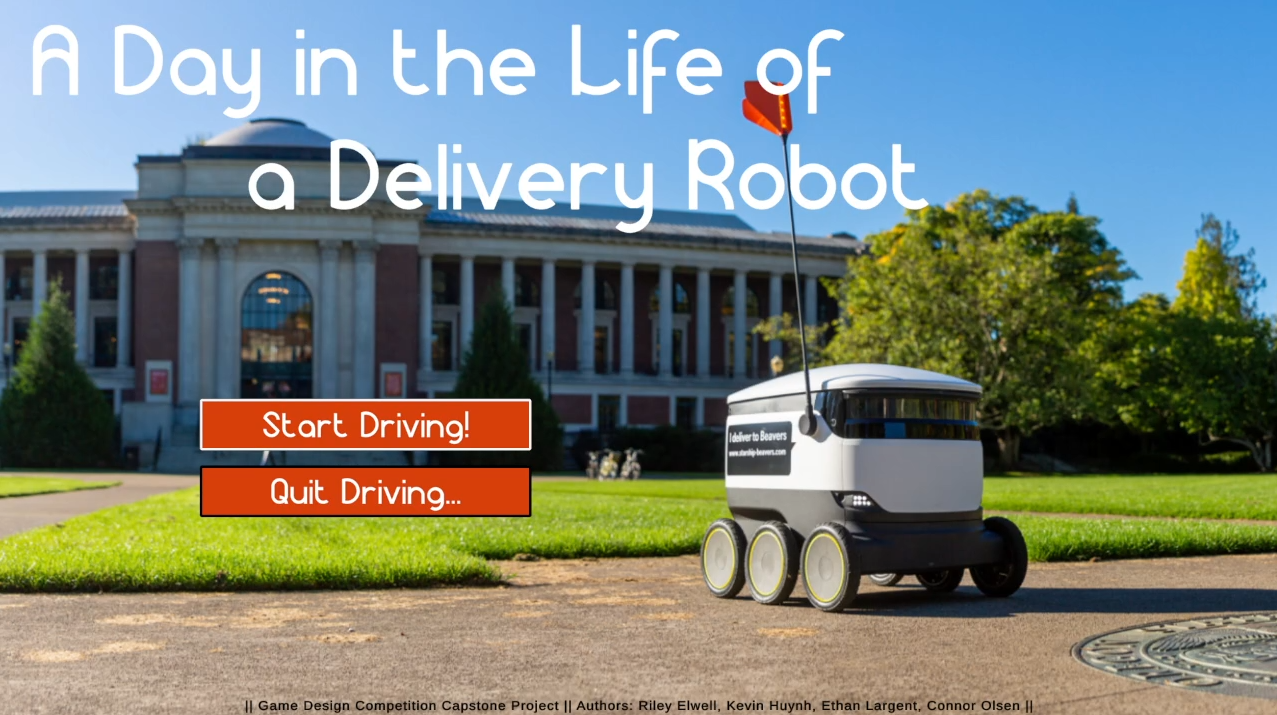
Deliver food as your favorite robot as fast as you can!
-

Level & UX Designer, 3D Artist
-

8 Months (2023-24)
-

4
My Contributions
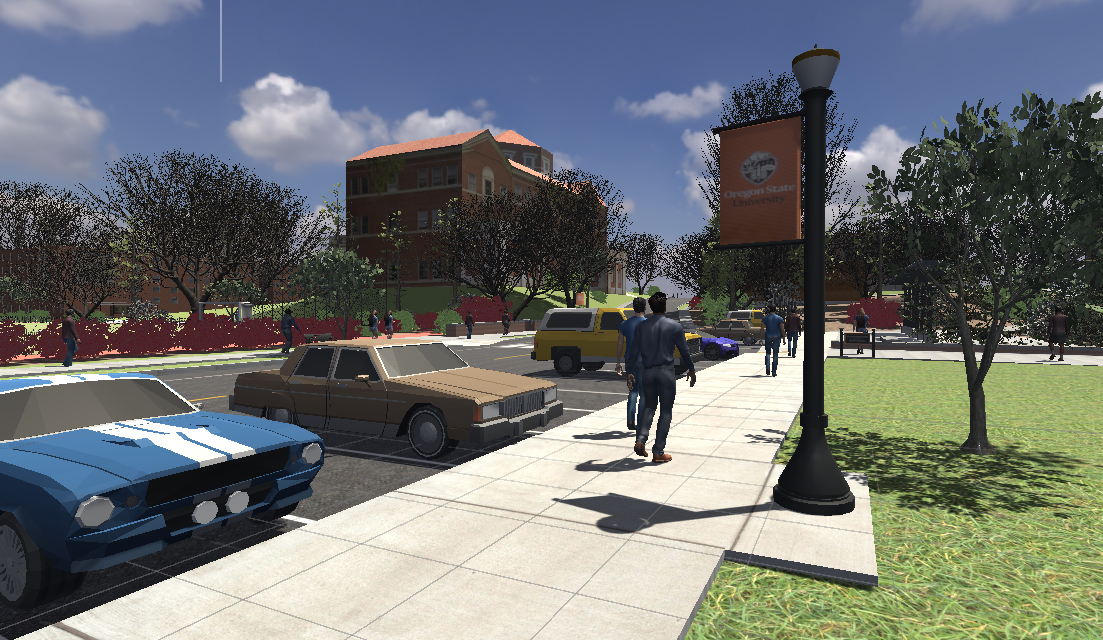
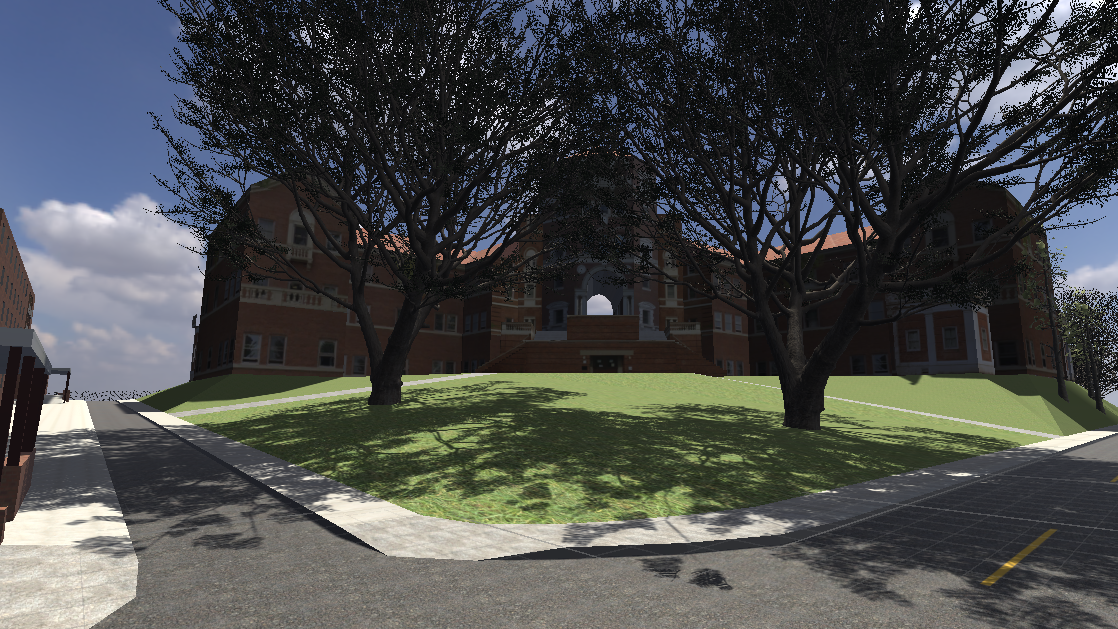
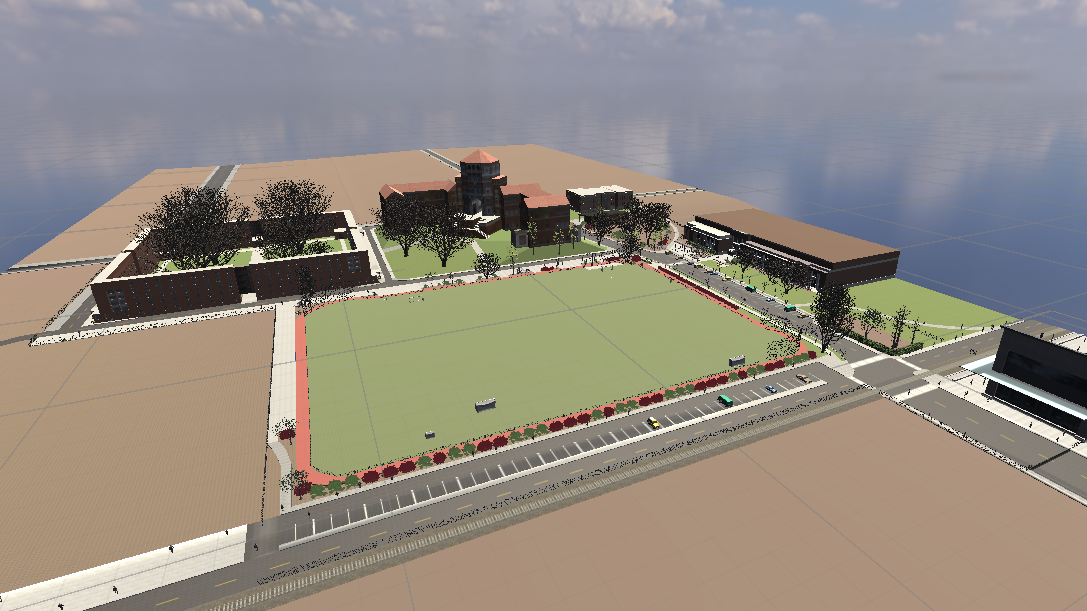
 Modelled and textured the whole map from scratch, mostly in Blender.
Modelled and textured the whole map from scratch, mostly in Blender. Designed gameplay systems for deliveries to be timed and given a score.
Designed gameplay systems for deliveries to be timed and given a score. Designed and implemented the UI for menus and gameplay HUD.
Designed and implemented the UI for menus and gameplay HUD. Added super cool hats and stickers as customizability options.
Added super cool hats and stickers as customizability options.
REFLECTION
This game project was very involved, but it was very rewarding in the end, especially when showing it to family and peers. Working as a group of four students with other classes and jobs, we had little time to communicate and work effectively as a team. This was easily the hardest part for me, but I think our goal of developing a fun and short game was successful in the end.
In terms of technical knowledge, I significantly improved my skills with Blender, particularly in modeling, texturing, UV editing, and exporting. I now understand how to synthesize textures in different applications and edit them in Quixel Mixer. Also, learning about seamless textures, tiling, and techniques like adding noise and random rotations has helped minimize repetitive patterns on my created surfaces. In Unity, I learned about using mesh colliders on imported objects and their interactions with rigid bodies based on topology. I improved my programming skills in C#, became better at testing features that need to be balanced (partly through conducting playtests), and learned how to do lighting.
Overall, I think there are a lot of necessary improvements for this project if it were to be revisited in the future. With our time crunch and poor communication habits, the final version of the game has several large bugs and poor performance. Features added towards the end did not have enough time to be properly tested, the map has a couple of collision issues, and the difficulty was harder than intended. With more time, better planning, and an in-sync team, I would love to implement a larger map, a better physics system, fix bugs, balance more appropriately, and adjust scenes for better performance.